بازوی رباتیکی الهامگرفته از اختاپوس ساخته شد
پژوهشگران مؤسسه فناوری ایتالیا بازوی رباتیک نرمی طراحی کردهاند که با بهرهگیری از مکندههای حساس میتواند شدت و جهت نیرو را تشخیص دهد و اشیا را بهصورت خودکار، حتی در زیر آب، در دست بگیرد.

به گزارش هممیهن آنلاین به نقل از ایرنا، وبگاه تکاکسپلور در گزارشی اعلام کرد پژوهشگران مؤسسه فناوری ایتالیا (IIT) موفق به طراحی بازوی رباتیک نرمی شدهاند که با الهام از ساختار بازوهای اختاپوس ساخته شده است. این بازوی رباتیک به کمک مکندههای مصنوعی خود قادر است تماس با اجسام را حس کند، شدت و جهت نیروی واردشده را تشخیص دهد و اشیا را بهصورت خودکار در هوا یا زیر آب بگیرد.
نتایج این پژوهش در نشریه «نیچر ماشین اینتلیجنس» منتشر شده و از آن بهعنوان گامی مهم در حوزه رباتیک نرم یاد شده است.
در رباتیک نرم بهجای استفاده از قطعات سخت و فلزی، از مواد انعطافپذیر و نرم استفاده میشود؛ رویکردی که به رباتها امکان میدهد تعامل طبیعیتر و ایمنتری با محیط و انسان داشته باشند. اختاپوس نیز به دلیل داشتن بازوهای انعطافپذیر و مکندههای بسیار حساس، الهامبخش این طراحی بوده است؛ بهطوری که در بدن این جانور بخشی از پردازش اطلاعات بهطور مستقیم در بازوها انجام میشود.
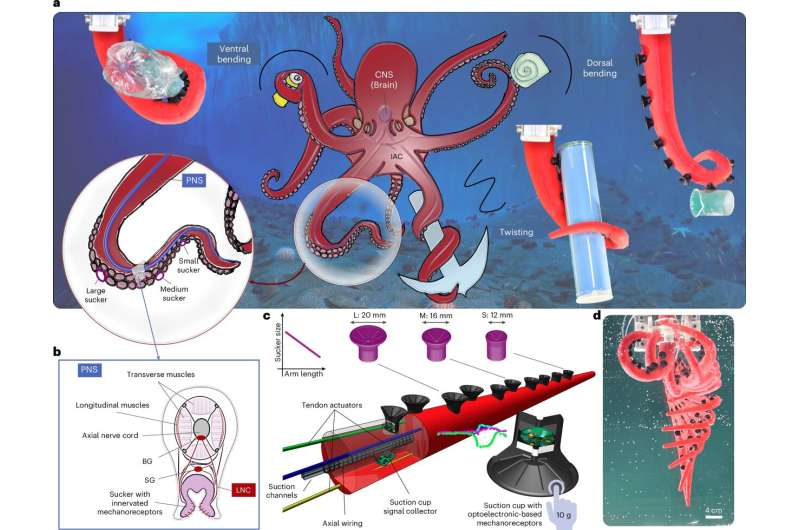
بازوی رباتیک جدید به مکندههای سیلیکونی مجهز شده که درون آنها حسگرهای بسیار کوچکی تعبیه شده است. زمانی که مکنده با جسمی تماس پیدا میکند، تغییر شکل آن موجب تغییر در نور ساطعشده از حسگرها میشود و همین تغییر به سامانه امکان میدهد شدت و جهت نیروی واردشده را تشخیص دهد.
اطلاعات بهدستآمده سپس توسط یک سامانه کنترلی پردازش میشود که عملکرد مکندهها و حرکت کلی بازو، از جمله خمشدن یا پیچیدن آن، را هماهنگ میکند. این سیستم قادر است حتی محرکهای بسیار ضعیف را نیز تشخیص دهد و در محیطهای مختلف، از جمله زیر آب، عملکرد مؤثری داشته باشد.
امانوئلا دل دوتوره، نویسنده اصلی این پژوهش، اعلام کرده است که با قرار دادن حسگرها در خود مکندهها، بازو میتواند بدون نیاز به کنترل متمرکز، بهصورت لحظهای به تماس واکنش نشان دهد. به گفته او، این ویژگی باعث ایجاد سامانهای مقاوم و کارآمد برای فعالیت در محیطهای پیچیده، بهویژه در زیر آب، شده است.
این بازوی رباتیک همچنین ساختاری مدولار دارد؛ به این معنا که تعداد و نحوه قرارگیری مکندهها را میتوان بر اساس نیازهای مختلف تغییر داد.
باربارا ماتزولای، سرپرست این پژوهش، نیز گفته است الهام گرفتن از اختاپوس باعث شده رباتی طراحی شود که در آن حس و عمل در سراسر بدنه توزیع شده است. به گفته او، این ویژگی به ربات اجازه میدهد تماس با اجسام را تفسیر کند و نحوه گرفتن آنها را بهصورت طبیعی و خودکار تنظیم کند.
بر اساس این گزارش، از این فناوری میتوان برای جابهجایی اشیای شکننده در زیر آب یا انجام عملیات بازرسی و تعمیر در محیطهای صنعتی دشوار مانند سکوهای نفتی و خطوط لوله زیرآبی استفاده کرد. پژوهشگران همچنین در حال تلاش برای افزایش ظرفیت حمل بار این بازو هستند تا بتواند اجسام سنگینتر و متنوعتری را جابهجا کند.


